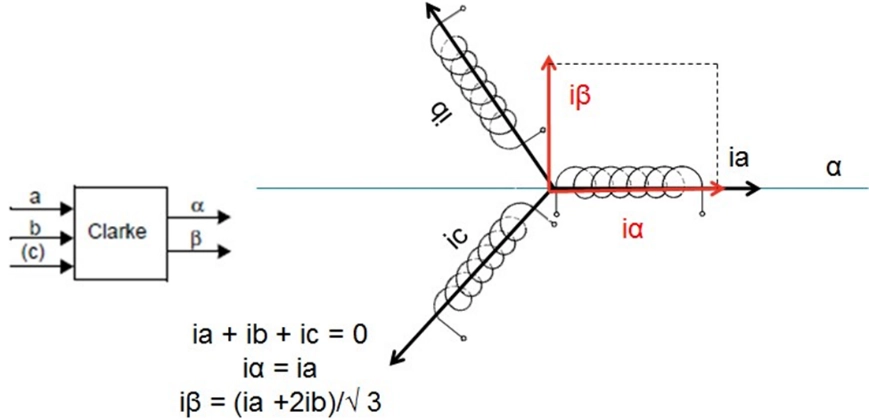
 These two currents in fixed stator phase coordinates undergo transformation into ISD and ISQ currents components in the [d,q] rotating frame through the Park transform, employing the electrical rotor’s angle from the Absolute Encoder SSI-BISS module.
These two currents in fixed stator phase coordinates undergo transformation into ISD and ISQ currents components in the [d,q] rotating frame through the Park transform, employing the electrical rotor’s angle from the Absolute Encoder SSI-BISS module. 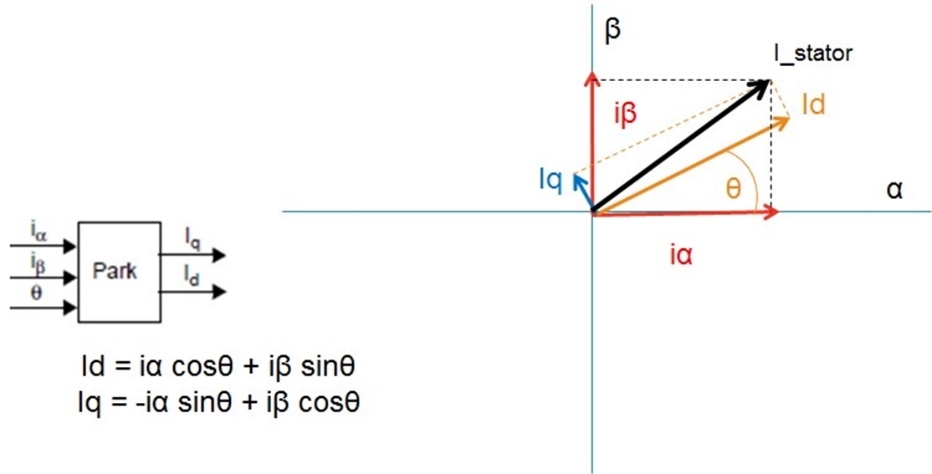 Proportional-Integral controllers regulate the variance between the desired torque and flux, maintaining the motor in the 90-degree magnetic/electric relationship. Post PID control, the inverse Park’s transform reverts Id, Iq values into Vα and Vβ stator voltages, feeding the PWM Space Vector Modulator.
Proportional-Integral controllers regulate the variance between the desired torque and flux, maintaining the motor in the 90-degree magnetic/electric relationship. Post PID control, the inverse Park’s transform reverts Id, Iq values into Vα and Vβ stator voltages, feeding the PWM Space Vector Modulator. 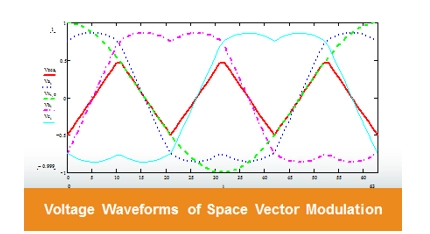 The SVM modulator produces a waveform resembling a pudding shape, instantaneously creating a homopolar structure on motor currents, resulting in sinusoidal flow. Figure 16 illustrates standard sinusoidal modulation, utilizing up to 86% of the DC_Link (yellow zone), while SVM allows up to 100% (red zone) before transitioning into non-linear motor movement.
The SVM modulator produces a waveform resembling a pudding shape, instantaneously creating a homopolar structure on motor currents, resulting in sinusoidal flow. Figure 16 illustrates standard sinusoidal modulation, utilizing up to 86% of the DC_Link (yellow zone), while SVM allows up to 100% (red zone) before transitioning into non-linear motor movement. 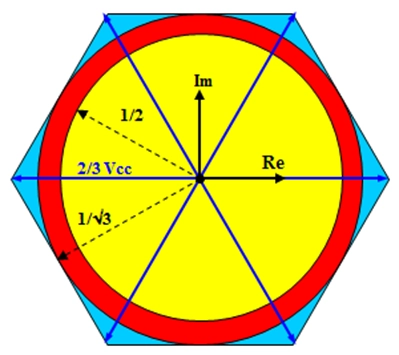 The power stage, depicted in Figure 17, integrates Gate Drivers, Mosfets, current sensors, and ADCs, configured for the 3-phase system.
The power stage, depicted in Figure 17, integrates Gate Drivers, Mosfets, current sensors, and ADCs, configured for the 3-phase system. 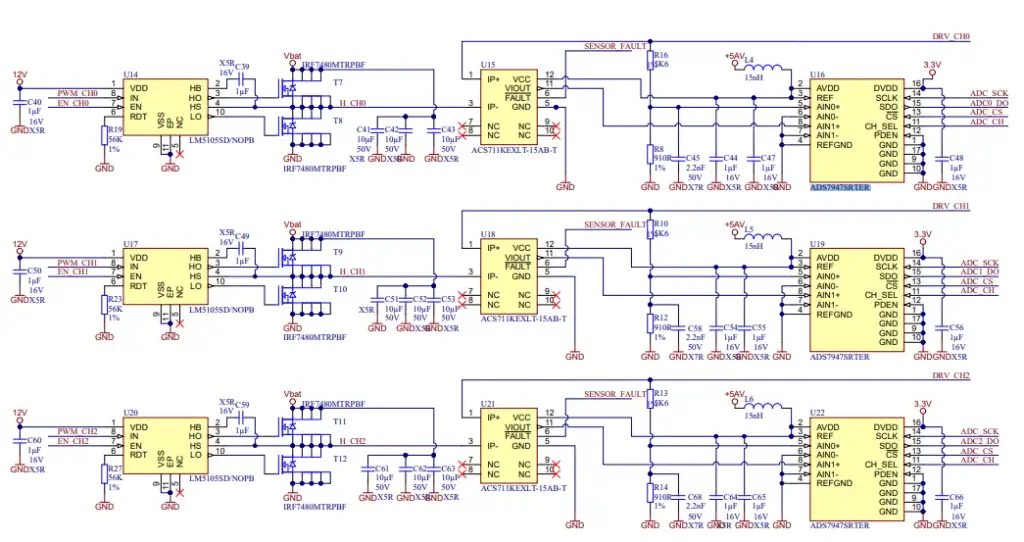 Motor Connection Configurations:
Motor Connection Configurations: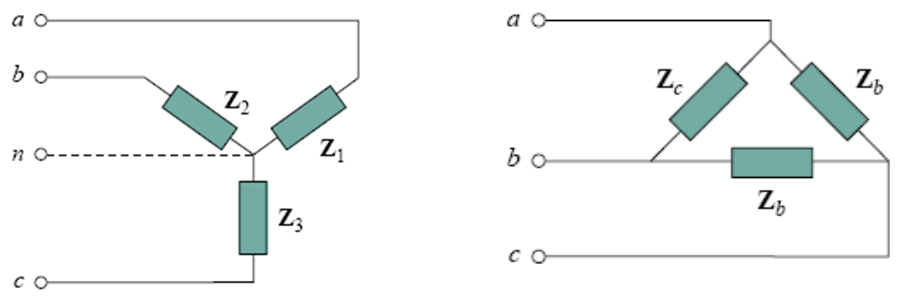
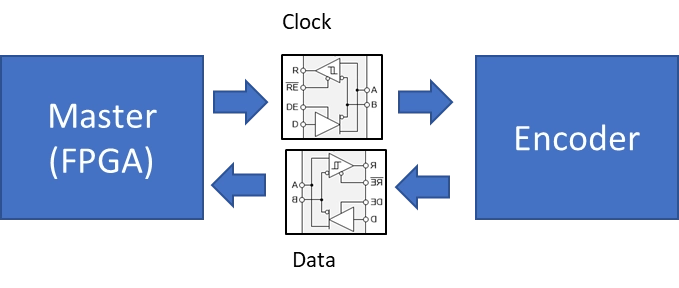 SSI Data, transmitted with the most significant bit (MSB) first, consists of 13 bits for angle transmission within one revolution (single turn). Multi-turns are also supported.
SSI Data, transmitted with the most significant bit (MSB) first, consists of 13 bits for angle transmission within one revolution (single turn). Multi-turns are also supported. 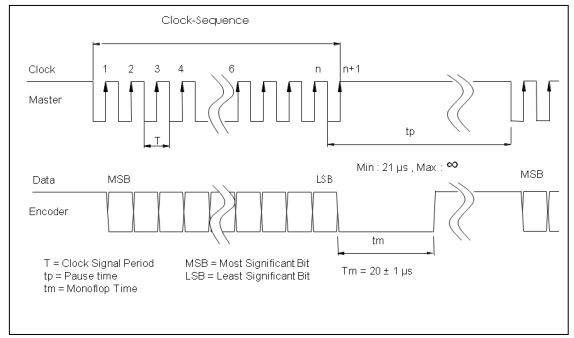 The figure below ring shift transmission, enhancing data safety by repeating the same data word. Various failure modes are meticulously addressed, ensuring protocol adherence and system safety.
The figure below ring shift transmission, enhancing data safety by repeating the same data word. Various failure modes are meticulously addressed, ensuring protocol adherence and system safety. 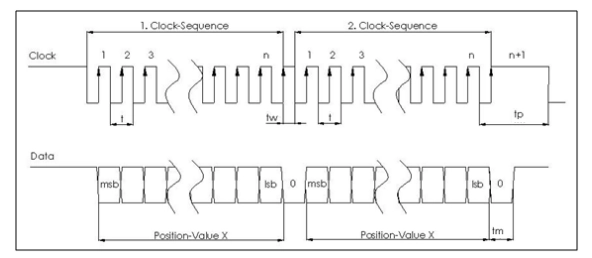 Would you like to know more about the intricacies of the Clark and Park transformations?
Would you like to know more about the intricacies of the Clark and Park transformations?
Choose MakarenaLabs as your trusted partner in Biopsy Automation